國內(nèi)激光雷達算法
激光雷達的誕生背景:20 世紀 60 年代初,科學家們基于當時激光技術的發(fā)展,創(chuàng)新性地提出了激光雷達的概念。1954 年首臺微波量子放大器的成功研制,以及 1960 年世界上首臺激光器的發(fā)明,為激光雷達的誕生奠定了堅實基礎。科學家們設想利用激光束的特性來探測目標,通過發(fā)射激光束并接收目標反射回來的信號,進而獲取目標的位置、速度等關鍵信息。這一設想開啟了激光雷達技術的探索之旅,隨著研究的逐步深入,激光雷達從理論走向?qū)嵺`,在眾多領域展現(xiàn)出巨大的應用潛力,成為現(xiàn)代科技中不可或缺的一部分。激光雷達是一種高精度、高效率的三維距離測量設備,廣泛應用于自動駕駛、智能交通、機器人導航等領域。國內(nèi)激光雷達算法
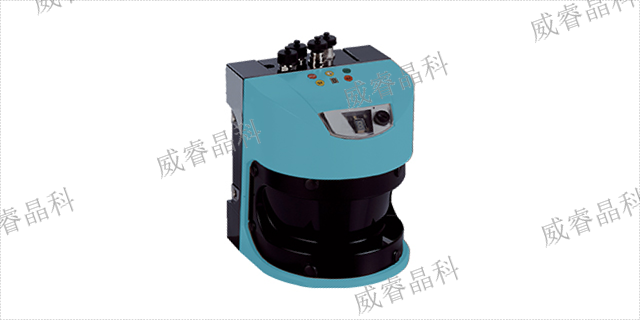
激光雷達
激光雷達在自動駕駛中的關鍵作用:在自動駕駛技術體系中,激光雷達扮演著至關重要的角色。它能夠精確測量車輛周圍目標物體的距離、速度和方位等信息,為車輛的決策和控制提供可靠的數(shù)據(jù)支持。例如,在復雜的城市道路環(huán)境中,激光雷達可以實時檢測前方車輛、行人、障礙物等目標,幫助車輛準確判斷行駛路徑和安全距離。與攝像頭等其他傳感器相比,激光雷達在暗光、強光等惡劣光照條件下受影響較小,能夠確保系統(tǒng)對環(huán)境感知的準確性。同時,它還能有效識別靜止及異形障礙物,如高速公路上的事故靜止車輛、施工路障物體等,提升了自動駕駛系統(tǒng)的安全性和可靠性,是實現(xiàn)自動駕駛不可或缺的關鍵部件。AGV激光雷達定位激光雷達在結構設計上注重緊湊性和輕便性,便于安裝和集成,能夠減少對周圍環(huán)境的干擾,提升整體使用效果。
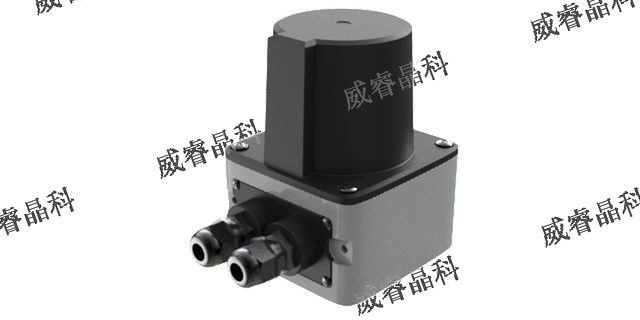
基于激光雷達的無人駕駛叉車的設計與應用:隨著工業(yè)自動化和智能化發(fā)展,無人駕駛叉車技術受到了關注。無人駕駛叉車能夠提高物流效率,降低人工成本,避免人為錯誤,已成為未來物流領域的重要發(fā)展方向。本文將從基于激光雷達的無人駕駛叉車技術的設計與應用方面進行詳細闡述。無人駕駛叉車技術的應用背景,叉車是現(xiàn)代物流系統(tǒng)中不可或缺的重要設備,應用于倉庫、工廠、港口等場所。然而,傳統(tǒng)的叉車操作需要人工駕駛,存在很多問題。首先,人工駕駛叉車效率低下,容易受到人體疲勞和精神狀態(tài)的影響。其次,人工駕駛叉車容易發(fā)生安全事故,給企業(yè)和員工帶來巨大損失。因此,研發(fā)無人駕駛叉車技術成為當務之急。激光雷達在無人駕駛叉車中的應用,激光雷達是一種高精度、高效率的傳感器,能夠獲取目標物體的距離、方位角、高度等信息。在無人駕駛叉車中,激光雷達被應用于定位、導航、避障等方面。首先,激光雷達可以通過對周圍環(huán)境的掃描,獲取叉車的3D點云數(shù)據(jù),從而進行精確定位和導航。其次,激光雷達可以利用獲取的數(shù)據(jù)進行路徑規(guī)劃,避免叉車與其他物體發(fā)生碰撞。激光雷達還可以實時檢測周圍環(huán)境的變化,及時調(diào)整叉車的運行狀態(tài),保證其穩(wěn)定性和安全性。
在考古研究中,激光雷達為探尋歷史遺跡提供了新的手段。它可以對大面積的考古區(qū)域進行非接觸式的探測,穿透地表植被和淺層土壤,發(fā)現(xiàn)隱藏在地下的古代建筑遺址、城墻遺跡等。通過對獲取的點云數(shù)據(jù)進行分析和重建,考古學家能夠在不破壞遺址的前提下,初步了解遺址的布局、結構和規(guī)模,為后續(xù)的考古發(fā)掘工作提供重要的線索和指導,極大地提高了考古工作的效率和科學性。
激光雷達在林業(yè)資源管理方面有著重要應用。它能夠快速測量森林的植被高度、樹冠密度、木材蓄積量等參數(shù)。通過定期對森林進行激光雷達掃描,可以監(jiān)測森林的生長狀況、評估森林生態(tài)系統(tǒng)的健康程度以及監(jiān)測森林火災后的植被恢復情況。這些數(shù)據(jù)對于合理規(guī)劃森林資源開發(fā)、制定森林保護政策以及開展森林生態(tài)研究都具有不可替代的價值,有助于實現(xiàn)林業(yè)的可持續(xù)發(fā)展。 激光雷達采用強光抗干擾技術,能夠在強光照射下正常工作,不受外界環(huán)境的影響,保證系統(tǒng)的穩(wěn)定性和可靠性。
激光雷達關鍵原理:激光雷達的運作基于光探測與測距原理,通過發(fā)射激光束并接收反射光信號來感知周圍環(huán)境。設備內(nèi)部的激光發(fā)射器向空間發(fā)射出多束激光脈沖,這些脈沖遇到物體后發(fā)生反射,接收器捕捉反射光,高精度時間測量系統(tǒng)記錄激光往返時間。根據(jù)光速恒定的物理規(guī)律,運用距離 = 光速 × 時間差 ÷2 的公式,就能精確計算出目標物體與激光雷達之間的距離。憑借這種原理,激光雷達可構建出目標物體的三維點云圖,如同給環(huán)境繪制出精細的 “數(shù)字畫像”,為后續(xù)的數(shù)據(jù)分析和決策提供基礎數(shù)據(jù)。高精度激光雷達價格仍然較高。高速激光雷達價錢
氣象激光雷達可監(jiān)測大氣顆粒物濃度。國內(nèi)激光雷達算法
激光雷達是什么?激光雷達(英文:LaserRadar),是以發(fā)射激光束探測目標的位置、速度等特征量的雷達系統(tǒng)。其工作原理是向目標發(fā)射探測信號(激光束),然后將接收到的從目標反射回來的信號(目標回波)與發(fā)射信號進行比較,作適當處理后,就可獲得目標的有關信息,如目標距離、方位、高度、速度、姿態(tài)、甚至形狀等參數(shù),從而對飛機、導彈等目標進行探測、跟蹤和識別。它由激光發(fā)射機、光學接收機和信息處理系統(tǒng)等組成,激光器將電脈沖變成光脈沖發(fā)射出去,光接收機再把從目標反射回來的光脈沖還原成電脈沖,送到顯示器。激光雷達擁有分辨率高、隱蔽性好和抗有源干擾能力強等優(yōu)點。其中,距離和速度分辨率高,意味著可以利用距離——多譜勒成像技術來獲得目標的清晰圖像,這也是激光雷達的優(yōu)點,多數(shù)應用都是基于此。另外,激光直線傳播、方向性好、光束非常窄,只有在其傳播路徑上才能接收到,因此他人截獲非常困難,且激光雷達的發(fā)射系統(tǒng)(發(fā)射望遠鏡)口徑很小,可接收區(qū)域窄,有意發(fā)射的激光干擾信號進入接收機的概率極低;另外,自然界中能對激光雷達起干擾作用的信號源不多,因此激光雷達抗有源干擾的能力很強。國內(nèi)激光雷達算法
- 無人機激光測距模塊哪家強 2025-07-09
- 深圳國產(chǎn)激光測距模塊咨詢問價 2025-07-09
- 飛行時間激光測距儀有幾種 2025-07-09
- 在線激光測距儀怎么樣 2025-07-09
- 威睿晶科激光測距儀如何收費 2025-07-09
- 廣東工業(yè)級激光測距儀 2025-07-09
- 鄭州激光測距模塊服務熱線 2025-07-09
- 河南激光測距模塊哪家好 2025-07-09
- 威睿晶科激光測距儀工廠直銷 2025-07-09
- 杭州激光測距傳感器模塊 2025-07-08
- 韶關專業(yè)投入式液位變送器品牌企業(yè) 2025-07-09
- 山東樹脂粒子檢測儀 2025-07-09
- 溫州進口合金材料成分分析儀 2025-07-09
- 甲醇紅外水分儀型號 2025-07-09
- 解決方案MIPID-PHY測試測試流程 2025-07-09
- BIM-7614 熱電堆型功率計探測器歡迎選購 2025-07-09
- 常熟直行程閥位變送器精度 2025-07-09
- 山東SMT貼片原理 2025-07-09
- 吉林精細化工安全儀表系統(tǒng) 2025-07-09
- 微機控制電子萬能試驗機型號 2025-07-09